ROBOTIC TACTILE ASSEMBLY
Combinatorics of Octocubes
In this case study, a sequential interlocking system is investigated for its architectural potential and robotic assembly. It seeks to integrate a computational design and robotic assembly approach that relies on discrete blocks which are dry-jointed. The blocks are aggregated with the help of digitally augmented combinatorics. Therefore, a design tool is implemented to reduce complex and tedious design tasks. This study proposes using an existing interlocking building block and appropriating the robot for its assembly. The assembly of the elements is achieved by an advanced robot integration, consisting of a visio-tactile sensor and robot learning.


Perfect Fit and Interlocking
-

Dry-Joined
The SL Blocks don’t come with accessory or integral connections; instead, the blocks themselves serve as the connection. Element geometry and connection logic are highly integrated. Thus, the geometry provides a robust quasi-perfect fit connection which makes the assembly an arduous task, even for humans.
-

Interlocking
The SL Blocks can be combined into a comprehensive set of arrangements. In the early stage of experimentation, various compositions of architectural components like columns, walls, and beams were investigated. The components in the figures are interlocked into steady structures. The placement of the black SL blocks is comparable to a key piece fixing all previously placed elements. The black pieces can only be removed in one direction while immobilizing all other blocks. Only by removing the black key pieces, the disassembly is possible without harming the blocks.
-

Materiality
Tests for articulating the SL Blocks in different ways were conducted. For coherent assembly of the blocks, it is prohibited to extend any geometry outside the bounding volume. A subtractive approach is suitable as long as the contact faces are provided.

Computational Design
The manual design with SL-Blocks is a tedious task since the engagement changes at each step, depending on the previously placed block. The possible placement of new blocks is constraint by the existing connection points within the current aggregation. This led to a combinatorial problem in which the choice of connection and the engagement of the following placed blocks determines the overall aggregation. Since the geometric transformations are defined relative to the previously placed block, selecting the same engagement may produce a different effect depending on the previous actions from a global point of view.
In Grasshopper the six engagements of the SL Blocks were inscribed as transformation matrixes and encoded via a string. The designer was able to manually define a string sequence or select a predefined sequence. This approach already minimized the overhead of manually modelling the engagements and drastically speed up the design process.

Viso-Tactile Sensor
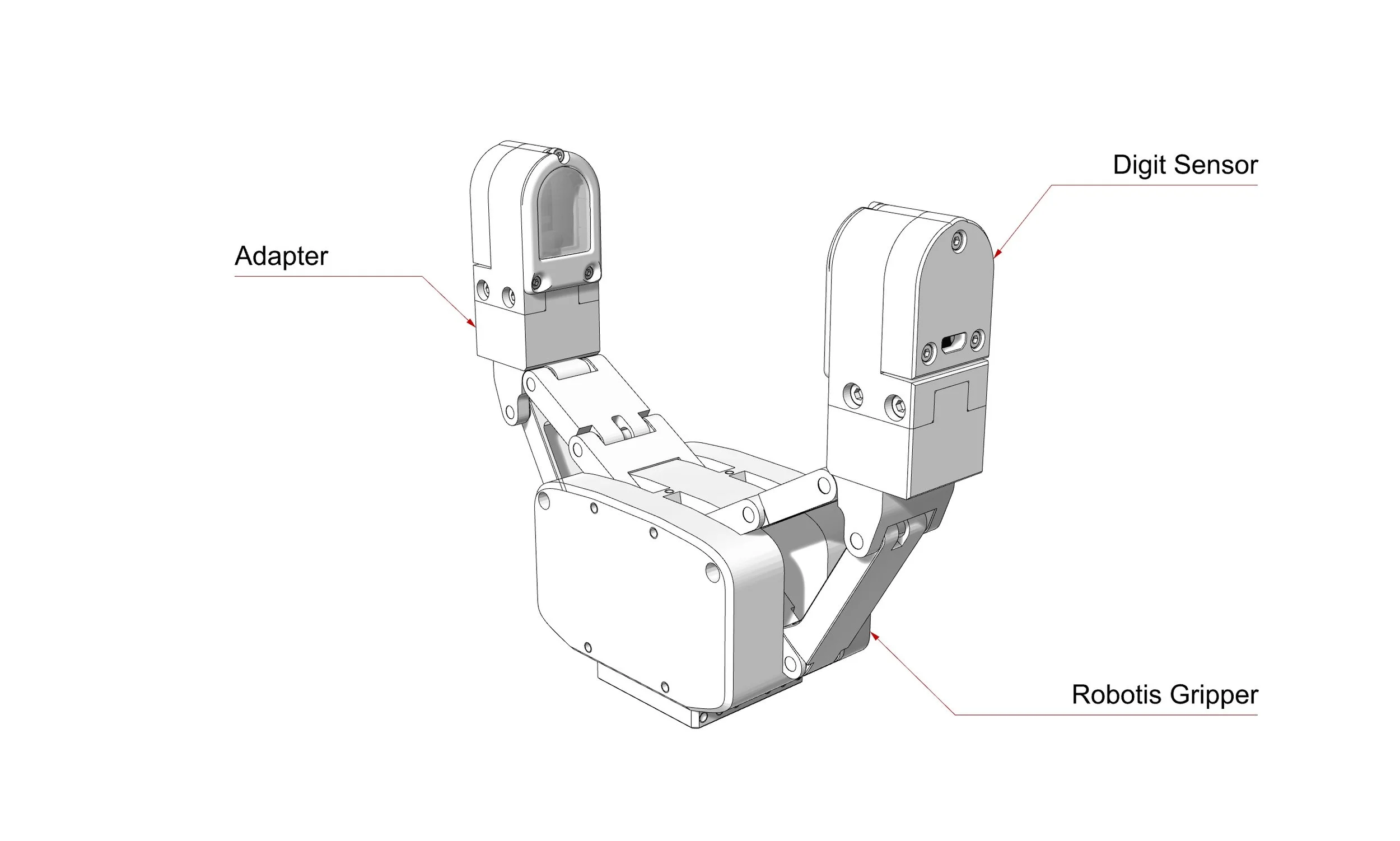
Gripper Design

Sense of Touch

Project Data
The project was developed during my PhD at the Digital Design Unit at the TU Darmstadt. It has been conducted under the title Tactile Robotic Assembly and was supported by the Forum for Interdisciplinary Research at TU Darmstadt. The collaborating professorships enabling this case study were the Intelligent Autonomous System Lab (IAS), led by Prof. Dr. Jan Peters, and the Digital Design Unit (DDU), led by Prof. Oliver Tessmann.
The entire project is a collaborative team effort. The people involved were: Christian Betschinske, Yuxi Lui, Niklas Funk, Samuele Tosatto, Tim Schneider and Jan Schneider, Frederik Wegner, Georgia Chalvatzaki and Boris Belousov.
This project received funding by the Federal Institute for Research on Building, Urban Affairs and Spatial Development on behalf of the Federal Office for Building and Regional Planning (BBR) with funds from the Zukunft Bau research program.